بررسی و پیاده سازی رباتهای امدادگر در عملیات جستجو و نجات
- شناسه خبر: 17672
- تاریخ و زمان ارسال: 29 خرداد 1396 ساعت 14:58

مجموعه اطلاعات این سنسورها در پردازنده ای که توسط متخصصان هوش و برنامه نویسان به الگوریتم های هوشمند مجهز شده با سرعت بالایی این اطلاعات تحلیل می شود.
حرکت روبات توسط سنسورهایی به نام انکودر قابل ارزیابی است، توسط فیدبک هایی که از این سنسورها دریافت می شود و با ترکیب اطلاعات شتاب سنجی که که در داخل سنسور ژیرسکوپ ما قرار دارد، حرکت روبات و میزان آن نیز مشخص و تاثیر در جا چرخیدن چرخ های روبات به این ترتیب حذف می شود. درست است که ما به روبات امدادگر دستور می دهیم برای مثال ۵ متر به جلو برود، ولی کامپیوتر روبات برای محاسبه این ۵ متر به میزان چرخش چرخ های خود وابسته نیست و بر اساس سرعت واقعی خودش که توسط شتاب سنج ها اندازه گیری می شود، مسافت طی شده را محاسبه می کند.
این روبات ها توسط سنسورهایی که برای تشخیص انسان روی آنها نصب می شود، سنسورهایی مانند حسکر دما و حسگر گاز دی اکسید کربن به تشخیص انسان و وضعیت مصدوم می پردازند. همچنین این روبات با استفاده از پردازش تصاویر ارسالی از دوربین ها و دوربین ویژه حرارتی خود می تواند وضعیت و محل مصدوم را گزارش کند. به عنوان مثال وقتی دمای محیط ۲۵ درجه است و دمای بدن شما ۳۷ درجه در دوربین حرارتی این روبات رنگ اطراف بدن شما با رنگ محیط بسیار متفاوت است و از طریق این ویژگی به شناسایی کمک می کند.
از کاربردهای ربات امدادگر می توان به اندازهگیری پارامترهای محیطی (نظیر دما، صدا، گاز و …)، ارسال تصاویر و صدا، ساختن همزمان نقشه محیط اکتشافی و پیدا کردن موقعیت ربات، جستجو برای یافتن مصدومان، استفاده از حسگرهای مختلف، نمونهبرداری و یا ایجاد تغییراتی در محیط و همچنین حمل محموله های خطرناک اشاره کرد.
[auth]
در بخش امداد زمینی، رباتهای امدادگر باید درون محیط ناهموار بر روی زمین حرکت کرده و فعالیتهایی همچون پیدا کردن مصدوم، جابجایی قطعات به کمک بازو و ترسیم نقشه محیط را انجام دهند. در بخش امداد هوایی، رباتهای پرنده باید از موانع موجود عبور کرده مصدومان را پیدا کنند و همچنین نقشه محیط را ترسیم نمایند.
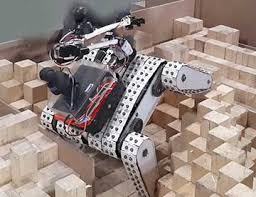
شکل۶: مانور ربات امدادگر
ربات امدادگر پرنده
رباتهای پرندهای که بالهای ثابت دارند، میتوانند به خوبی بین سی تا یکصد و بیست متر پرواز کنند. ارتفاعی بالاتر از ارتفاع درختان و البته پایینتر از خطوط

پروازی متعلق به سایر تجهیزات پرنده. به کمک این رباتها به راحتی میتوان یک نمای بزرگ از نواحی تخریب شده را مشاهده کرد.
شکل۷: قسمتهای مختلف ربات امدادگر
رباتهایی که شبیه هلیکوپتر هستند، میتوانند حتی به زمین نزدیکتر هم بشوند. آنها میتوانند از داخل پنجرهها به درون منازل سرک بکشند تا از عدم وجود مصدوم در خانهها اطمینان حاصل شود. حتی پس از پایان عملیات امداد به کمک این پرندهها میتوان اطلاعات دقیقی از ساختار و کیفیت تخریب در نواحی آسیب دیده بهدست آورد.
در کل بهترین ربات پرنده رباتی هست که دارای قدرت مانور بالایی باشد یعنی تغییر جهت حرکت و تغییر موضع را با بالاترین سرعت انجام دهد. توانایی پرواز به مدت زمان طولانی را داشته باشد و دارای اندازه ی کوچکتر و قدرت پروازی بیشتر را با امکان پرواز در ارتفاعات بالاو امکان ارسال اطلاعات صحیح به اپراتور داشته باشد همچنین دارای سیستم هوشمند ی برای مسیر یابی هوشمند باشد.
نتیجهگیری و جمعبندی
به طور کلی این باور وجود دارد که اگر کسی پس از زلزلهای مهیب یا هر فاجعهی دیگری، در میان آوار و ویرانی گرفتار شود، میتوان امیدوار بود که در زمانی حدود هفتاد و دو ساعت پس از حادثه فرصت برای نجات او وجود داشته باشد. متاسفانه این واقعیتی تلخ است که بسیاری از بازماندگان حادثه در زیر آوارها مدفون میمانند و جان خود را از دست میدهند، تنها به این دلیل که امدادگران فرصت کافی برای نجات آنها نمییابند. تولید رباتهای امدادگر این امید را ایجاد میکند که فرآیند مشکل و پرخطر جستجو و یاری رسانی به مصدومین پس از زلزله و آوار با سرعت بیشتری صورت پذیرد و بازماندگان از حادثهای چنین تلخ همواره این داغ را در سینه نگاه ندارند، که اگر سرعت عملیات امداد بیشتر بود شاید آنها نیز عزیزی را از دست نمیدادند. امیدواریم که رباتهای امدادگر بتواند نقشی موثر در این عملیات ایفا نماید.
مراجع
[۱] دکتر محسن موسوی ، دکتر ابراهیم برز آبادی ،”الکترونیک عملی ” چاپ دوم ، انتشارات دانشگاه اصفهان ، پاییز۸۵
[۲] علیرضا زارع پور ، ” رباتیک چگونه ربات بسازیم” چاپ دوم ، انتشارات نص ، زمستان ۸۶
[۳] Borenstein, J., Koren, Y., “Histogramic In Motion Mapping for Mobile Robot Obstacle Avoidance”: IEEE Journal of Robotics and Automation, Vol. , No. 4, (1991) 535-539.
[۴] Shigley, Joseph Edward: Mechanical Engineering Design, 6th edn. , McGraw-Hill
[۵] Andreas Birk and Holger Kenn. “A control architecture for a rescue robot ensuring safe semi-autonomous operation”. In Gal Kaminka, Pedro U. Lima, and Raul Rojas, editors, RoboCup-02: Robot Soccer World Cup VI, LNAI. Springer, 2002.
[۶] M. R. Mosavi, K. Mohammadi, M. H. Retan, M. Farroki, “Prediction of errors and improvement of positioning accuracy on low cost GPS receiver with MLP neural network”, Proceeding of 11 ICEE, pp. 513-520, 2003.
[۷] H. Mirmohammad-Sadeghi, H. Bastani and E. Azarnasab , IUTMicrobot Robocup 2003 TDP, Proceedings of the 2003 International Robocup 2003, Padova, Italy, 2003
[/auth]







