بررسی و پیاده سازی رباتهای امدادگر در عملیات جستجو و نجات
- شناسه خبر: 17662
- تاریخ و زمان ارسال: 29 خرداد 1396 ساعت 12:24

حسین اسلامی۱، امیرهاتفی۲، میثم خادمی طاب۳
۱کارشناس ارشد مهندسی الکترونیک، سازمان آتش نشانی و خدمات ایمنی شهرداری تهران؛ (Eslami_robo@yahoo.com)
۲کارشناس مدیریت پیشگیری، سازمان آتش نشانی و خدمات ایمنی شهرداری تهران ؛ (hatefi_amir@yahoo.com)
۳کارشناس مهندسی مکانیک، موسسه آموزش عالی کار قزوین؛ (mkht.46@gmail.com)
چکیده
سالانه هزاران نفر بر اثر آسیب دیدن و یا مفقود شدن در زیر آوار ساختمان ناشی از حوادث غیرمترفبه از قبیل زلزله سیل، زلزله، انفجار وآتش سوزی جان خود را از دست می دهند . طراحی، پیاده سازی و استفاده از ربات های امدادگر نه تنها با جستجوی علائم حیاتی مصدومان باعث کاهش زمان و افزایش چشمگیر دقت جستجو می گردد بلکه عملیات نجات را برای مصدوم و تیم امداد امن تر می کند . در این مقاله به بررسی اجمالی نقش رباتهای امدادگر در کاهش تلفات انسانی می پردازیم.
مقدمه
از سال ها قبل با توجه به نیاز مبرم به امدادرسانی موثر به مصدومان هنگام وقوع زلزله، جنگ یا سایر بلایا، پژوهشگران علم روباتیک به برنامه ریزی برای ساخت روبات های امدادگر پرداختند. ایده اصلی ساخت روبات هایی بود تا با کمک آنها امدادگران بتوانند در محل های غیرقابل عبور به جستجوی مصدومانی بپردازند که در زیر آوار مانده اند. امروزه دانشگاه های بسیاری در ایران به فناوری و روش های ساخت روبات های امدادگر مجهز شده اند و ساخت این روبات ها به بالا بردن توان فنی کشور در مقابله با حوادث طبیعی مانند زلزله دارند. ربات های امداد گر می توانند اطلاعات بـسیار حـساس و پـر اهمیت را برای مراکـز کنترل امداد، پس از بروز حادثه ای سهمگین تامین نمایند. به کمک این ربات ها ضرورتی وجود ندارد که برای مساعد شدن شرایط انتظار بکشید تا پس از آن دریابید که کدام نواحی آسیب دیده اند ، کجا بیشترین صـدمه را متحمـل شـده و کـدام راههـا هنوز برای دسترسی به محل حادثه دیده قابل استفاده اند.
[auth]
محیطهای تخریب شده بر اثر زلزله از محیطهایی هستند که اعزام نیروی انسانی جهت شناسایی محیط خطرات جانی برای امدادگر را به دنبال دارد. چرا که پس لرزهها و سقوط آوار در این محیطها بسیار محتمل می نماید. ایده استفاده از ربات در این محیطها مورد نظر محافل علمی جهان میباشد. از آنجایی که پس از زلزله وضعیت حیاتی مصدومان و محل قرارگیری آنها برای گروه امداد نامشخص میباشد، مناسب است که رباتهایی برای شناسایی و ارسال گزارش به این محیطها اعزام گردند. سپس گروه امداد با توجه به این اطلاعات دقیقا به سراغ مصدومانی بروند که احتمال نجات آنها وجود دارد و در کمترین زمان و با پذیرفتن کمترین ریسک جانی به محل مورد نظر برسند.
به عنوان مثال زمانی که محیطی آلوده به مواد شیمیایی خطرناک یا آلوده به تشعشعات رادیو اکتیو باشد و اندازهگیری پارامتری از محیط، ارسال تصاویر و صدا، نمونه برداری و یا حتی ایجاد تغییراتی در محیط (بستن شیر گاز یا آب، باز کردن در و پنجره، جابجا کردن اشیا) نیاز باشد، اعزام ربات پایه متحرک راه حل
مشکل میباشد. از این رباتها انتظار میرود که قادر باشند از موانع صعبالعبور ناشی از ریزش آوار عبور کنند و در ضمن ارسال تصویر و صدا به مرکز کنترل، اطلاعاتی از وضعیت حیاتی مصدومان مانند دما، حرکت، صدا و گازهای تنفسی را گزارش نمایند.

کلیات ربات امدادگر
ربات های امدادگر رباتهای پایه متحرکی هستند که برای تعامل با محیط واقعی طراحی و ساخته میشوند. این کلاس از رباتهای پایه متحرک در هر محیطی که امکان اعزام نیروی انسانی دارای محدودیت باشد و همچنین دارای خطرات جانی باشد، مورد استفاده قرار میگیرند.
ربات امدادگر یک روبات کنترل دستی است، یعنی روباتی است که توسط اپراتور کنترل می شود.این ربات توانایی عبور از سطوح ناهموار را دارد و دارای بازوی روباتیک است که می توان در مواقع اضطراری و با کنترل از راه دور از این بازو به عنوان دست مهربان یک پزشک استفاده کرد و جان انسانی را نجات داد. رباتهای امدادگر هرچند ساختار و شمایلی همچون تانک دارند اما بسیار حرف گوش کن هستند و می توان از راه دور و توسط پایگاه های زمینی یا حتی ماهواره آن را کنترل کرد سنسورها و دوربین های مختلف دارد که به ربات در پیمودن مسیر و انجام دستورات کمک می کنند. همچنین به نوعی چشم و گوش امدادگران واقعی در زیر آوار است و اپراتور روبات می تواند اکثرا تا هشت تصویر را به طور همزمان از طریق روبات دریافت کند و با داشتن ایده کاملی از شرایط و موقعیت مصدوم، تصمیم گیری کند. رباتهای امدادگر دارای یک بازو هستند یکی از ویژگی های مهم این بازو درجات آزادی بسیار آن است که باعث راحتی حرکت و انعطاف پذیری بیشتر بازو برای اجرای ماموریت محول شده به آن می شود. مچ این بازو نیز بسیار خوب طراحی شده به گونه ای که می تواند در زوایای مختلف حرکت کند.

شکل ۲:ربات امدادگر حمل مصدوم
در محل هایی که حادثه ای رخ داده گاهی نیاز است این بازو وارد دالان هایی شود و به کمک دوربین هایی که روی آن قرار داده شده، بتواند محل را دقیق تر جستجو کند یا زیر آوار را ببیند یا حتی بسته های حیاتی اولیه مثل یک بطری آب یا داروهای خیلی ضروری و حیاتی را حمل کرده به مصدوم برساند تا گروه های امدادی بتوانند بعد از پاکسازی و سر فرصت آن مصدوم را نجات دهند. ربات امدادگر بعد از وارد شدن به محل حادثه می تواند نقشه محل را با کمک سنسورهای پیشرفته خود تهیه کند و با ارائه محل دقیق مصدومان، کمک مهمی برای امدادگران در محل حادثه باشد. روبات های امدادگر در حال حاضر کنار نیروهای امدادی در سراسر جهان در حال انجام ماموریت های امداد و نجات هستند.
البته این روزها روبات هایی مثل ربات امدادگر حتی در نیروهای پلیس و ارتش های جهان نیز به خاطر قابلیت های بی پایان این دسته از روبات ها حضور دارند. از نمونه های مختلف آن برای انواع عملیات ضدتروریستی، ضدگروگانگیری و اهداف نظامی بهره می برند. برای مثال می توانید تصور کنید که نزدیک شدن به یک بمب کارگذاری شده در شهر چقدر می تواند برای نیروهای آموزش دیده و ارزشمند پلیس خطرناک باشد. در آن موقع رباتهای امدادگر مثل فرشته نجات از راه می رسند و پلیس می تواند در حالی که صدها متر دورتر از محل بمب گذاری در یک کابین امن نشسته است، ناجی را به جنگ بمب فرستاده و مراحل خنثی سازی اولیه را با بازوی روباتیک پیشرفته آن انجام دهد. به دلیل توقعات بالایی که از این گونه روبات ها انتظار می رود، در طراحی آنها پایداری از لحاظ الکتریکی، مکانیکی و ارتباطی اهمیت بسیار بالایی دارد.
به غیر از روبات های هدایت دستی، سری دیگری از روبات های امدادگر ساخته می شود که به روبات های امدادگر خودمختار مشهورند. البته این روبات ها هنوز برای عملیاتی شدن راهی طولانی در پیش دارند. این گونه روبات ها به صورت کاملا خودکار و بدون نیاز به اپراتور، وارد زمین مسابقه شده و مصدومان را کشف می کنند و روی نقشه ای که ارائه می دهند محل دقیق مصدومان را مشخص می کنند، البته زمین مسابقه این گونه روبات ها بسیار ساده تر از زمین روبات های هدایت دستی است، زیرا هنوز در ابتدای کار هستند.

شکل۳: ربات امدادگر عبور از منطقه خطرناک
قسمتهای مختلف ربات امدادگر
یک سنسور لیزری روی روبات امدادگر وجود دارد که پرتوهای لیزر را با سرعت بسیار بالا به اطراف پخش می کند و با دریافت انعکاس آنها و بررسی فواصل اندازه گیری شده می تواند به صورت دو بعدی و سه بعدی نقشه دیواره ها و وضعیت اطراف روبات را ارائه کند.
مهم ترین بخش هوشمند روبات هدایت دستی روش تهیه نقشه محیط است، وجود یک سنسور لیزری روی روبات که پرتوهای لیزر را با سرعت بسیار بالا به اطراف پخش می کند و با دریافت انعکاس آنها و بررسی فواصل اندازه گیری شده می تواند به صورت دو بعدی و سه بعدی نقشه دیواره ها و وضعیت عوارض اطراف روبات را ارائه کند. این بخش نیازمند این است که روی روبات پردازنده هایی جهت آنالیز دیتاهای دریافتی از سنسورها موجود باشد و این کار یک مساله پیچیده در بخش هوش و الگوریتم های کنترلی روبات است.
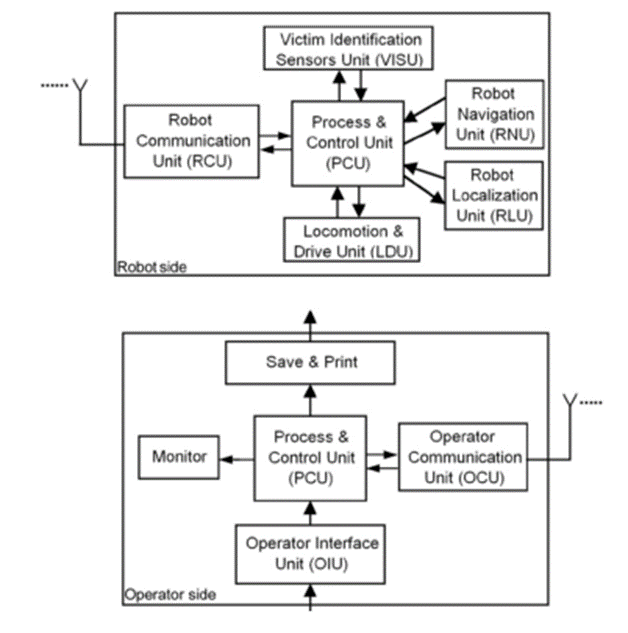
شکل۴: بلوک دیاگرام قسمتهای مختلف ربات به همراه کنترل
به این نکته توجه کنید که روباتهای امدادگر در یک نقطه نمی ایستد، بلکه مدام در حال حرکت است و موقعیت آن به نسبت محیط اطراف تغییر می کند پس باید قابلیت و هوشمندی ارائه مسیر دقیق حرکت و نقشه مناسب را با استفاده از انواع سنسورهای تشخیص موقعیت، سنسور لیزری و پردازش های هوشمند داشته باشد. یکی دیگر از حسگرهای این روبات که در تهیه نقشه ها بسیار کاربرد دارد، حسگر ژیرسکوپ است، به عنوان مثال فکر کنید روبات محل یک میز را در نقشه مشخص می کند، لحظه بعد روبات می چرخد جای میز که نباید عوض شود، در نقشه هم زمانی که روبات روی صفحه فرمان می دهد، اپراتور باید چرخش روبات را نسبت به محیط احساس کند که این سنسور میزان چرخش روبات را مشخص می کند و با ترکیب

شکل۵: قسمتهای مختلف ربات امدادگر
ادامه در مقاله بعدی… .
[/auth]







