طراحی و ساخت ربات امدادگر زمینی
- شناسه خبر: 27244
- تاریخ و زمان ارسال: 23 آذر 1399 ساعت 16:12
. مقدمه
ربات های امداد گر می توانند اطلاعات بـسیار حـساس و پـر اهمیـت را بـرای مراکـز کنترل امداد، پس از بروز حادثه ای سهمگین تامین نمایند. به کمک این ربات ها ضرورتی وجود ندارد که برای مسا عد شدن شرایط انتظار بکشید تا پس از آن دریابید که کدام نواحی آسیب دیده اند ، کجا بیشترین صـدمه را متحمـل شـده و کـدام راههـا هنوز برای دسترسی به محل حادثه دیده قابل استفاده اند.
محیطهای تخریب شده بر اثر زلزله از محیطهایی هستند که اعزام نیروی انسانی جهت شناسایی محیط خطرات جانی برای امدادگر را به دنبال دارد. چرا که پس لرزهها و سقوط آوار در این محیطها بسیار محتمل می نماید. ایده استفاده از ربات در این محیطها مورد نظر محافل علمی جهان میباشد. از آنجایی که پس از زلزله وضعیت حیاتی مصدومان و محل قرارگیری آنها برای گروه امداد نامشخص میباشد، مناسب است که رباتهایی برای شناسایی و ارسال گزارش به این محیطها اعزام گردند
هدف از طراحی و ساخت رباتهای امدادگر این است که بتوانند در زمان حوادث غیر مترقبه و بلایای طبیعی به کمک انسانها شتافته و در اعمال مختلف نظیر مهار آتش سوزی ، جستجو و نجات مصدومان از زیر آوار و انتقال آنها به بیمارستان و باز کردن جاده های مسدود شده به تیمهای امداد کمک کنند .
با توجه به عدم پیشرفت کافی جهت طراحی مکانیکی چنین رباتهایی که با توجه به خصوصیات محیط های آسیب دیده از جمله حرارت بسیار زیاد یا بسیار کم ، نا همواری سطوح و نبود هوا در بعضی موارد باید از قابلیت های بسیار بالایی برخوردار باشند . رباتهای امدادگر به دو بخش شبیهسازی و رباتهای مکانیکی تقسیم شده است . در بخش شبیه سازی ، یک حادثه طبیعی مثل زلزله در یک شهر بزرگ شبیه سازی می شود. با وقوع زلزله ساختمانهای زیادی خراب شده و شهروندان زیادی زیر آوار گرفتار میشوند ، همچنین جاده های زیادی در شهر مسدود میشوند و تعدادی از ساختمانهای شهر نیز آتش می گیرند. هدف رباتها برنامه ریزی نیرو های امداد و انجام اعمال مختلف امداد خاموش کردن آتش ، باز کردن جاده های مسدود شده و نجات مصدومان به صورتی است که در پایان میزان آسیب های وارد شده به دلیل وقوع زلزله به حداقل ممکن برسد.
-
کلیات ربات
از خصوصیات ربات امدادگر ما می توان به سیستم حرکتی پولی و شنی اشاره کرد بطوریکه ربات در عبور از برخی موانع مانند سطوح شنی ، ماسه ای و بسیاری از ناهمواری ها و موانع قابلیت حرکت بالایی دارد . علت این قابلیت پیوسته بودن این سیستم حرکتی و انتقال مناسب نیرو از موتور به محیط می باشد. در این ربات علاوه بر استفاده از سیستم یکپارچه یک لینک جداگانه برای افزایش طول ربات طراحی شده است .
ویک بازو ۴ درجه آزادی به طول ۸۰ سانتی متر در جلوی ربات تعبیه شده است که قابلیت افزایش طول به ۱۲۰ سانتی متر را نیز دارا می باشد و قابلیت حمل اجسامی به وزن یک کیلو گرم در فاصله یک متری را دارد و همچنین با دوربینی که بروی لینک مچ دارد می تواند نمای کلی تری از زمین حادثه را داشته و قادر است خطرات احتمالی کنار مصدومین را رویت کند.

. شرح مکانیک ربات
۱-۳٫ سیستم حرکتی ربات
در این ربات از سیستم حرکتی پولی و شنی استفاده شده است . این سبک سیستم حرکتی سبب می شود ربات در عبور از برخی موانع مانند شیب ۴۵ ، عبور از پله به ارتفاع ۲۰ سانتی متر ، سطوح شنی ، ماسه ای و بسیاری از ناهمواری ها و موانع قابلیت حرکت بالایی دارد . علت این قابلیت پیوسته بودن این سیستم حرکتی و انتقال مناسب نیرو از موتور به محیط می باشد. در این ربات علاوه بر استفاده از سیستم یکپارچه یک لینک جداگانه برای افزایش طول ربات طراحی شده است .
به این صورت که دو بازو با دو شنی مستقل در جلوی ربات قرار داده شده است که در صورت نیاز قابلیت باز شدن را دارد تا با افزایش طول ربات قادر باشد از موانعی همچون پله و سطوح ناهموار با ارتفاع بالا و نیز همچنین برای عبور از روی کلوخ های بزرگ از آن استفاده کند.
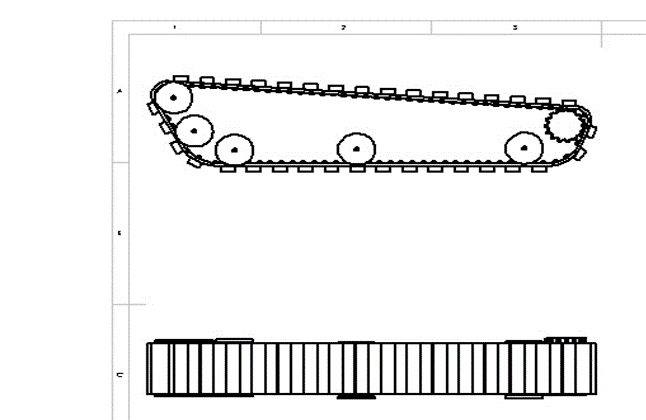
-۳٫ شنی ربات
با توجه به تجربیات این تیم در ساخت ربات در گذشته و استفاده از انواع شنی ، در این ربات از نوع جدیدی از شنی استفاده شده است که مشکلات ناشی از انواع استفاده شده در گذشته را نداشته باشد . از جمله این مشکلات میتوان به سفت شدن ریگلاژ شنی هنگام عبور از زمین های شنی و ماسه بادی و همچنین خرد شدن چرخدنده های پلاستیکی در هنگام عبور از سنگ ریزه ها اشاره کرد . برای رفع این مشکل در طراحی جدید از چرخدنده ای فلزی سبک استفاده شده است و همچنین برای جلوگیری از ماندن سنگ ریزه ها و شن و ماسه در لابه لای شنی عرض شنی تا حد امکان کاهش پیدا کرده است .

۳-۳٫ سیستم انتقال قدرت
پس از بررسی مکانیزم های مختلف از قبیل مکانیزم شنی و دیگر مکانیزم های رایج در ربات ها تصمیم بر این گرفتیم که از سیستم شنی متحرک در این ربات استفاده کنیم که در واقع هر موتور به یک پولی کوپل می شود.
۴-۳٫ طراحی شاسی،بدنه و جانمایی
برای ساخت شاسی در این قسمت از قوطی های ۲*۴ و ۲*۲ استفاده می شود. همچنین از پلیت ۰٫۸ میلی متر در بدنه مورد استفاده قرار می گیرد. طراحی شاسی ، بدنه و جانمایی توسط نرم افزار اتوکد و catia انجام گرفته است.

۵-۳. موتورهای اصلی
در این ربات برای حرکت دادن شنی ها از ۴ موتور گیربکس استفاده شده است که در واقع برای تحرک هر شنی یک موتور طراحی شده است. این موتورها دارای ۹۰ وات، توان خروجی و ۱۱۰ rpm دور بر دقیقه می باشد .
با توجه به توان بالای این موتور و ولتاژ آن که ۱۲ولت می باشد اما آمپر کشی ای نوع موتور بسیار مناسب بوده و با توجه به فشار وارده بر شنی ها نزدیک به ۱۸آمپر خواهد کشید.
۶-۳٫ مرکز ثقل و توزیع وزن و سیستم تعلیق ربات
در این ربات طراحی شاسی ، موقعیت قرار گرفتن موتورها و باطری ها ، نسبت اندازه طول به عرض ربات و اندازه لینک های جلوی ربات به گونه ای محاسبه و ساخته شده است که ربات در عبور از ناهمواری ها شدید ، سطوح شیبدار تا شیب ۴۵ درجه و سرعت های بالا بالانس خود را حفظ نموده و از تعادل خرج نشود.
همچنین با وجود ابعاد نسبتا کم آن که قابلیت مانور بالا را به همراه می آورد جای کافی برای نسب ادوات و بردهای الکتریکی را دارا باشد و در عین حال دید مناسبی برای دوربین های نسب شده روی ربات را به همراه داشته باشد.
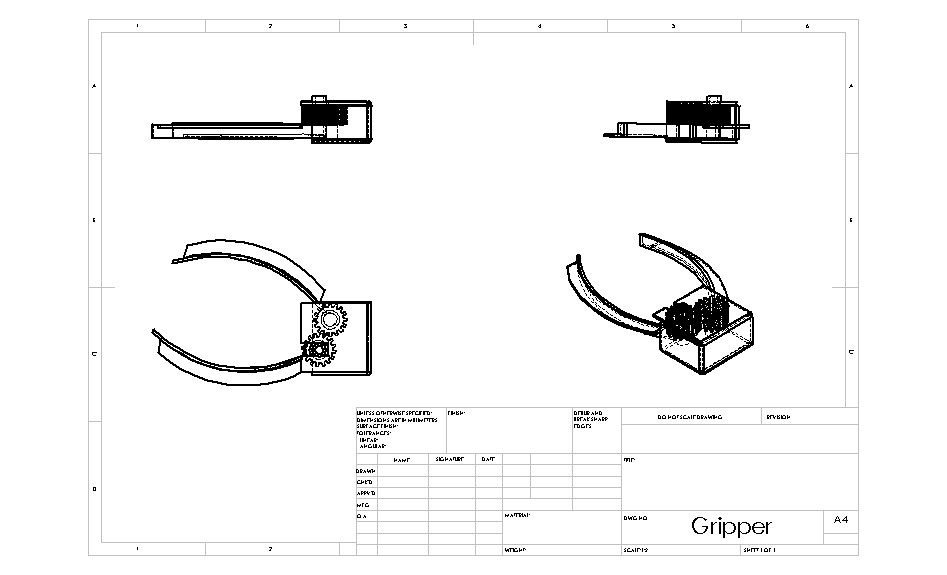
۷-۳٫ گریپر (بازوی ربات)
بازوی طراحی شده در عین سادگی با کارایی و قابلیت حرکتی بالا دارای ۳ درجه آزادی می باشد . این بازو که در جلوی ربات طراحی شده است قابلیت دارد حول محور z و حول محور y و حول محور x دوران کند و با دقت بالا وسایل را از روی زمین جا به جا می کند.
۴٫شرح الکترونیک ربات
با توجه به نوع و ساختار طراحی شده ربات الکترونیک ربات به قسمتهای زیر تفکیک شده است.
۱-۴٫ بورد مرکزی
که وظیفه کنترل تمامی قسمت های ربات و جمع آوری اطلاعات را برعهده دارد و با قسمت های دیگر مانند بورد درایور موتور ها ، سنسورها ، فرستنده گیرنده ها و … از طریق I2C BUS مرتبط است.تمامی مراحل کنترل و جمع آوری اطلاعات با سرعت بالا و با توجه به برنامه پردازنده که بر اساس الگوریتم طراحی شده نوشته شده است،اجرا می گردد.این بورد به قسمت های گوناگون تقسیم شده است. تغذیه ، که شامل مدار محافظ در برابر اضافه ولتاژ و اضافه جریان ، رگولاسیون ولتاژ سوئیچینگ و کلید های ON/Off می باشد.بورد پردازنده ، که شامل میکرو کنترلر اصلی و مدارهای جانبی می باشد که وظیفه پردازش ، تصمیم گیری و کنترل تمامی قسمت های ربات را دارد.در ضمن وظیفه selftest مدار ها بر عهده این قسمت می باشد . بورد ارتباطی ، که شامل میکرو کنترلر مدیریت باس ارتباطی بین بورد ها و همچنین فرستنده گیرنده وایرلس دیتا می باشد.
۲-۴٫ درایور موتور
که به چند قسمت تقسیم شده است. بورد کنترل موقعیت و سرعت موتور DC ، که شامل یک H – Bridge با ترانزیستور های EXFET(Power Mosfet) طراحی شده است و دارای تغذیه ورودی باتری ایزوله از مدار های دیجیتال می باشد. پردازنده این بورد با توجه به فرمان های ارسالی به کنترل PWM و مونیتورینگ موتور می پردازد.ورودی انکودر نوری نیز در این بورد جای داده شده است که به عنوان فیدبک سرعت و موقعیت استفاده می گردد.با استفده از سنسورهای اثر هلال جریان عبوری نیز کنترل می شود .دمای موتور و بورد قدرت نیز از دیگر فیدبک های این بورد می باشد.بورد کنترل موتور های سروو ، که نقش کنترل موقعیت موتور های سرووی بازو با توجه به فرمان های ارسالی را بر عهده دارد و تا ۲۴ موتور سرو قابل اتصال می باشد.
۳-۴٫ بورد IMU
که دارای ماژول IMU و یک پردازنده برای ارتباط با باس دیتا و ارسال و دریافت اطلاعات می بلشد .نقش آن فیدبک گیری می باشد تا بتوانیم موققعیت و زاویه ربات را لحظه به لحظه به دست آوریم.
۴-۴٫ فرستنده گیرنده دیتا
دارای با ۱۶ باند و فرکانس کریر ۴۳۳MHz با قابلیت شبکه شدن می باشد و دارای ۵۰۰mw توان خروجی می باشد.پروتکل ارتباطی آن سریال (UART) با نرخ ۹٫۶kbpsمی باشد

۵-۴٫ ریموت کنترل دستی ربات
که دارای کلیدهای دو حالته و پتانسیو متری می باشد که با آنها می توان ربات را کنترل و با سرعت های دلخواه حرکت داد.یک بازو شبیه به بازوی ربات در اندازه کوچک نیز برای کنترل بازوی ربات ساخت شده است که با جابجایی سر بازو فرمان تمامی مفاصل بازوی اصلی حرکت کرده (Arm Tracking)
- شرح نرم افزار و هوش ربات
الگوریتم کنترل و مانیتورینگ ربات طوری طراحی شده است که هر قسمت به طور جداگانه عمل کرده و از طریق باس دیتا پردازنده مرکزی کنترل و مانیتورینگ را به دست می گیرد.روال کار به این صورت است که پردازنده ارتباطی کنترل باس دیتا را به عهده دارد و هیچ تغییری در محتوای دیتا ی خام نمی دهد . پردازنده مرکزی یک data packet می فرستد و با توجه به آدرس ارسالی مقصد که یکی از بورده ای دیگر می باشد دریافت می کند و پس از دیکد و اجرای فرامین با یک packet پاسخ می دهد. بدین صورت تمامی قسمت ها تحت نظر و فرمان بخش مرکزی قرار می گیرند.
۶٫نتیجه گیری
این ربات با توجه به خاصیت های مکانیکی موجود می تواند تقریبا تمام مسیرهای مختلف در زمین از جمله ناهمواری با هر سطحی مانند خاک، شن ، ماسه ، سنگریزه و… مشکل خاصی نداشته واز موانع موجود در زمین مانند الوار و سطوحی مانند پله گذرکرده سراشیبی و سرازیری با شیب ۴۰ درجه را طی کرده و در مناطقی مانند حوضچه آب و یا محیطهای گلی مشکل نخورد و تمام سطوح رابگذراند.
برد کنترلر آن تقریبا ۱۰۰۰ متر بوده و چون توان خروجی آن بالا بوده هیچ گونه مشکلی در برابر نویز نداشته و ربات تحت کنترل باشد.
حسین اسلامی۱، میثم خادمی طاب۲، علیرضا سیم جور۳
- کارشناس مهندسی الکترونیک و رباتیک، کارمند عملیات سازمان آتش نشانی
- کارشناس مهندسی مکانیک و رباتیک
- کارشناس ارشد مهندسی کنترل و رباتیک
Eslami_robo@yahoo.com
- ۷. مراجع
۱- دکتر محسن موسوی ، دکتر ابراهیم برز آبادی ،”الکترونیک عملی ” چاپ دوم ، انتشارات دانشگاه اصفهان ، پاییز۸۵
۲- علیرضا زارع پور ، ” رباتیک چگونه ربات بسازیم” چاپ دوم ، انتشارات نص ، زمستان ۸۶
۳– Power Control Circuits manual : R.M.marston
۴- Analysis And Design of Analoge intergrated circuits : Pole Gray
۵- inematic synthesis of linkages :Richard HartenbergJ. Casper., and R. Murphy, 2002 Workflow on human-robot interaction in USAR, in proceedings of the IEEE international conference on Robotics and Automation, volume 2, 1997-2003. Washington DC:
۶-H. Mirmohammad-Sadeghi, H. Bastani and E. Azarnasab , IUTMicrobot Robocup 2003 TDP, Proceedings of the 2003 International Robocup 2003, Padova, Italy, 2003